Engineering: Prerecorded presentation - Panel 3
Location: Online - Prerecorded
Presentation 1
ADRIENNE CHEN, Rajesh Ghosh, Dino Di Carlo
The goal of this project is to develop a rapid, low-cost fluorogenic assay for measuring bacterial viability and antibiotic susceptibility using capped nanovials. This assay is based on the resazurin–resorufin redox system, in which metabolically active bacteria convert resazurin, a nonfluorescent blue dye, into resorufin, a pink fluorescent product. Through this mechanism, bacterial growth and viability can be directly linked to fluorescence intensity, allowing microscopy images to be converted into quantitative measurements of biological activity. High bacteria concentrations had fluorescent signal appear earlier than low bacteria concentrations. The current challenge is improve signal retention, reduce background noise, and enable more accurate quantification, particularly at low bacterial concentrations where detection is most challenging.
Presentation 2
KATHERINE LIM, Ben Yang
The Center for Heterogeneous Integration and Performance Scaling (CHIPS) is currently developing a voltage regulating module (VRM) to step down voltage from 48V to 1.8V. One important evaluation of VRM performance is an efficiency curve, which plots efficiency (output power as a percent of input power) across different currents. Previously, the collection of data points was done manually, resulting in an hour-long process to create one efficiency curve. To expedite this process, automation was utilized to rapidly collect points. NI Measurement & Automation Explorer (MAX), which contained the device drivers, was used to connect the computer to the testing equipment. To send SCPI commands to devices, the PyVisa package was used. To improve the speed of the program, measurement time for devices was individually recorded to determine the greatest time sinks. Finally, calibration of device parameters took place to optimize performance. By the end of this project, VRM efficiency curves were completed in 3 minutes. Resulting efficiency testing collected more points along the curve and also tested for different input voltages, a process that would have taken significantly longer without automation.
Presentation 3
MICHAEL MAKHOUL
The ferrobotic platform aims to support decentralized, flexible diagnostic testing across a range of assay types. Current assay readout is done by standard methods such as spectrophotometry, constraining well placement and limiting chip design flexibility. However, camera-based readout for point-of-care diagnostics is becoming more common with the rise of IoT-enabled healthcare devices. This paper investigates the ability of a camera-based imaging approach to reliably replace assay readout across different chip locations. To evaluate this, we compare camera-derived signal measurements (within the RGB space) with spectrophotometric results to determine whether meaningful concentration differences can be observed. Within this work, we will consider the following factors: imaging environment, sensor design, image processing, and model architecture. We will attempt to create model that fits the RGB space (rather than absorption) to concentration measurement, offering an alternate calibration curve for camera-based assay readout within the ferrobotic platform. By doing so, this should expand the flexibility of the ferrobotic platform by removing restrictions in current chip design.
Presentation 4
Chengyue Wang, YU XI ONG, Xinhang Guo, Xavier Chan, Jason Cong
This project explores the implementation and performance impact of asymmetric tile buffering on both the AI Engine (AIE) and Programmable Logic (PL) components of a heterogeneous computing system. The primary objective is to evaluate how modifying tile dimensions and buffer structures can improve data movement efficiency and overall system performance.
The approach begins with implementing asymmetric tile buffering on the AIE side by adjusting buffer sizes and loop structures. These modifications are tested using aiesim through graph.cpp to verify correctness and functional behavior. Following this, the implementation is extended to the PL side, where memory core configurations and stream widths are modified to support asymmetric tiling. System-level simulation is then conducted to validate integration and measure performance improvements.
The results are expected to show that asymmetric tile buffering reduces data transfer bottlenecks and improves throughput, particularly on the PL side where memory and streaming constraints are more significant. This work demonstrates the importance of co-designing memory layouts and compute structures in heterogeneous architectures. The significance of this project lies in its potential to inform more efficient hardware-software optimization strategies for high-performance computing applications.
Presentation 5
DANIEL SONG, Xiaofeng Lin, Guang Cheng
Graph-based defenses using Graph Neural Networks (GNNs) and graph anomaly detection (GAD) represent the leading paradigm for securing large language model (LLM) multi-agent systems (MAS). These defenses model inter-agent communication as graphs and detect anomalous nodes or edges, implicitly assuming that adversarial influence originates from an identifiable source whose removal halts harm. We study a blind spot in this paradigm: when harm is realized by delayed composition over persistent artifacts, maliciousness is not localized to any node or edge in the communication graph. We use Context-Fractured Decomposition (CFD) to expose this gap. CFD distributes a prohibited objective into benign-appearing sub-tasks across temporally separated contexts and multiple agents, so that (1) no single agent acts as a malicious origin, (2) the true causal pathway runs through the artifact store rather than the monitored message graph, and (3) harm emerges as a set-wise compositional property rather than a node-level anomaly. We evaluate CFD alongside traditional propagation-based attacks against G-Safeguard across four MAS topologies. Preliminary results indicate that the defense substantially reduces Attack Success Rate for single-origin baselines while leaving CFD largely unaffected, providing evidence that provenance-oblivious graph defenses are incomplete without artifact-aware monitoring.
Presentation 6
EDWARD SUN, Yuchen Cui
Large Language Models (LLMs) have shown strong capabilities in code generation, embodied reasoning, and high-level planning, making them promising policy generators for embodied agents. However, standard autoregressive decoding lacks sequence-level guarantees, often producing plans that violate execution constraints, including malformed outputs, hallucinated actions, and precondition or affordance failures. These errors arise from global constraints on future sequences rather than local next-token mistakes. We propose a compact two-level neuro-symbolic decoding framework for exactly constrained, futureaware generation. Our approach combines DFA-conditioned decoding to enforce syntactic and grounding constraints (𝛾) with a two-level Hidden Markov Model (HMM) that provides tractable lookahead over semantic constraints (𝛽). By introducing a meta-token abstraction over actions, we factor constraint reasoning across token and action granularities, avoiding the combinatorial explosion of monolithic constraint composition while preserving correctness guarantees. We evaluate our method on both real-world and benchmark settings. On a physical XArm7 system using both hand-coded and Vision-LanguageAction (VLA) primitives, our approach improves robustness on tasks where standard LLM decoding fails. On the Embodied Agent Interface benchmark, we observe substantial gains over baseline LLM generation, including improvements from a single-level instantiation. Ongoing work evaluates the full two-level framework at scale.
Presentation 7
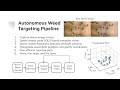
ELI WHITAKER, EVELYN ZHU, Brian Ye, Mohammad Khalid Jawed
Weeds reduce crop yield and are commonly controlled using herbicides or large mechanical systems, both of which can increase cost and environmental impact. This project investigates a compact laser based weed management system that uses stereo vision, computer vision, and a diode laser to detect and target weeds with high spatial precision. Two cameras capture left and right images of the workspace, and image based stem detections are stereo matched and triangulated to estimate weed locations in three dimensions. A motion control pipeline then guides the laser to each target for localized treatment. Current work focuses on integrating detection, calibration, triangulation, and autonomous targeting into a single control loop and evaluating whether this smaller system can achieve reliable stem level precision. This project is significant because it explores a lower cost and more selective robotic alternative for precision weed removal.
Presentation 8
TERRENCE WU, Xiaolin Zhong, and Jeff D. Eldredge
In hypersonic flight, the transition from laminar to turbulent boundary-layer flow represents a critical design challenge, driving steep rises in surface heat flux, aerothermodynamic friction, and material stress, and directly governing thermal protection system (TPS) design and vehicle survivability. As such, accurate prediction of the transition onset is vital, requiring an understanding of the amplification of instability mechanisms and the role of environmental disturbances under high Mach number conditions. Traditional approaches – such as direct numerical simulation (DNS) and linear stability theory (LST) – provide insight, but are computationally expensive and limited by uncertainty in free-stream disturbances and wall conditions.
Recent academic research has demonstrated that machine-learning and data-assimilation techniques can predict boundary-layer conditions from limited surface measurements. This project improves upon those advances by coupling high-fidelity simulations of hypersonic flow over various geometries with ML algorithms trained to predict the laminar-to-turbulent transition location. The results highlight the importance of integrating physics-based instability analysis with data-driven methodologies to improve accuracy and reliability in hypersonic flow prediction and TPS design.